



2 中国科学院脑科学与智能技术卓越创新中心 上海 200031;
3 中国科学院应用数学研究所 北京 100190;
4 中国科学院自动化研究所精密感知与控制研究中心 北京 100190
2 CAS Center for Excellence in Brain Science and Intelligence Technology, Shanghai 200031, China;
3 Institute of Applied Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Science, Beijing 100190, China;
4 Research Center of Precision Sensing and Control, Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China
当前,机器人成为全球的热点话题,然而,机器人的研究和应用依然存在“瓶颈”。例如,如何让机器人实现:(1)柔性、灵巧的动作;(2)智能感知与智能控制;(3)与人协作、交互,都还存在一定的困难。如何让机器人技术产生“质”的飞越,形成下一代机器人的关键技术,成为科学家、企业家和政府关注的重点问题之一。
一直以来,人们对机器人的梦想是:机器人越来越接近人,成为人的助手和“朋友”。然而,机器人的灵巧性、智能性和与人的“共情性”还不能达到人们的期望。我们认为,想让机器人与人成为朋友,让机器人更“像人”,有以下两条途径。
(1)以功能和性能为导向,根据人的观察和分析建立认知、决策和控制模型,用于机器人系统。许多生物启发式模型得到了广泛的应用,相关研究成果也已在机器人视觉、听觉和控制等领域取得了重要的发展;
(2)结合脑科学研究成果,从机理、结构的角度模仿人。神经科学与信息科学的深度交叉融合,有希望为机器人理论和应用研究带来新的突破,这也是我们想要提出的“类脑”智能机器人。
经过初步探索,我们认为“类脑”智能机器人可能有3大特点
。(1)研究的出发点不同。以功能和性能为导向的方法,主要基于对机器人的功能的要求开展研究。根据所需的功能,从外表和观察对系统实现进行猜测。这种方法把人的认知能力、学习能力和动作控制能力看作是一种“黑箱”模型;而“类脑”智能机器人以探索人的内部机理为导向,从宏观、介观再到微观,层层深入,理解人体内部的具体机制。这种方法希望使人的认知能力、学习能力和动作控制能力逐渐“白化”,从“黑箱”模型逐渐成为“灰箱”模型。
(2)技术、方法和理论不同。以功能和性能为导向的方法,通常基于一定的假设和猜测,并利用现有的数学工具进行描述,容易在泛化能力上产生一定的局限性;而“类脑”智能机器人基于人类的内部机理,不会受局限于假设、猜测和数学工具,可能会有更强的泛化能力和学习能力。
(3)应用表现不同。以功能和性能为导向的方法,针对某种特定场景,在充分对参数进行优化调节的基础上,可能在部分具体功能上产生突出的效果;而“类脑”智能机器人通过长期逐步白化“黑箱”模型的内部机理,从内部逐渐提高性能,有可能在各种不同场景下获得更好的泛化能力。
如图 1所示,“类脑”智能机器人力图将人的内部机理融入机器人系统,从而将“黑箱”模型逐渐“白化”。同时,我们可以将已经实现“白化”的机理模型,形成一定的应用,从而提高机器人的认知、学习和动作控制能力。“类脑”智能机器人由于融入了对人的机理的探索,有希望实现与人“共情”,与人产生更深度的交互与合作,也有希望对于国防、工业、服务业等领域提供更多的帮助。
 |
| 图 1 “类脑”智能机器人与以功能和性能为导向方法的 出发点不同 |
近年来,出于探索人类自身的本能和使命,以及精神疾病普遍化对脑科学提出的迫 切需求,世界范围内各国正相继开展“脑计划”:2013 年1月欧盟人脑工程(Human Brain Project,HBP)入选了欧盟的“未来关 键旗舰技术项目”(European Commission Future and Emerging Technologies Flagship),获得了10 亿欧元的资金支持[1]。该工 程主要目标是加深人类对大脑的理解,同时 也在针对大脑疾病全新预防和治疗方式和 能够变革产业、经济和社会的更为先进的计算技术两方面给人们带来新的启发。
2013 年4月,美国总统奥巴马宣布启动了名为“通过推动创新型神经技术开展大脑研究”(Brain Research through Advancing In-novative Neurotechnologies,BRAIN)的计划,并由 美国国立卫生研究院(NIH)、美国国家科学基金会 (NSF)和美国国防部高级研究项目局(DARPA)三家机构共同出资资助[2]。其中,NIH重点开发研究 大脑的新技术,致力于开发和应用新的工具来绘制出大脑回路;NSF支持跨学科研究大脑,包括物理学、生物学、社会学和行为科学,致力于开发一 系列包括人在内的各种生物体生命过程中脑功能所必需的实体工具和概念性工具;DARPA重点探索大脑的动力学方面(dynamic function of the brains)的功能,致力于促进数据处理、成像、先进分析技术的发展。
2014 年9 月,日本科学省宣布了日本“大脑研究计划”(Brain Mapping by Integrated Neurotechnologies for Disease Studies,Brain/MINDS)的首席 科学家和组织模式[3]。日本“大脑研究计划”的核心任务是制造出转基因狨猴,利用这种动物模型研究人类的认知功能,并开展相关疾病研究。
神经机器人平台(Neurorobotics Platform)在欧、美脑计划中均有涉及,其主要目的是提供开发工具,将精细的人脑模型连接到虚拟环境中的仿真人体上。该系统为神经认知学家提供了一种新的研究策略,以前他们只能依靠人类和动物的自然实验来获取研究结论,而现在可以借助仿真,揭示隐藏在行为之下的大脑的各种多层级的运作原理。从技术角度来说,该平台也将为开发者提供必备的开发工具,帮助他们开发一些有接近人类潜质的机器人,实现“类大脑”化的中央控制器。
近年来,一些学校和公司开始开展“类脑”智能机器人的相关研究。瑞士洛桑理工学院(École Polytechnique Fédérale de Lausanne,EPFL)开发了神经系统仿真工具(The Neural Simulation Tool,NEST),为机器人的神经系统模拟提供了基础[4]。在“蓝脑计划”(The Blue Brain Project)的支持下,学院的研究人员研究了小白鼠的大脑的数字化重建工作(图 2)。他们已模拟出一只小白鼠完整大脑中约2100万个神经元中的3.1万个模拟神经元。该研究近期被发表在Cell杂志[5]。
 |
| 图 2 数字鼠脑控制的虚拟鼠 (图片来源:https://documents.epfl.ch/groups/e/ep/epflmedia/www/20150223_HBPBiorobotics/photos/Copyright_HBP_BBP_EPFL_horizontal.jpeg) |
瑞士苏黎世大学(University of Zurich)搭建了世界上第一个拥有“肌腱”和“骨头”的机器人平台ECCE Robot(图 3),相关研究成果在2010年获得美国Popular Machanics报道,列为2010年10大创新概念首位[6]。
 |
| 图 3 ECCE Robot平台(图片来源:http://eccerobot.org/home/robot/systemoverview.html) |
美国DeepMind 公司(2014 年被美国Google 公司收购)提出了Neural Turing Machine,利用深 度增强学习实现了靠不断试错学习就可获得提高的游戏人工智能(Artificial Intelligence,AI)[7]。这些AI靠着对游戏视频的观察来自动寻找出模式,然后操作控制器,并获得得分的反馈结果(高分奖 励)。该公司的相关工作已被发表在Nature 杂志上;目前,DeepMind 正在研制基于长时短期记忆的递归神经网络(Long Short-Term Memory- Recurrent Neural Network,LSTM-RNN)控制的无人机,通过学习可不断提高无人机飞行的效果。
3 “类脑”智能机器人的潜在优势在我们团队粗浅的研究过程中,初步发现“类脑”智能机器人包括两个优点:认知的鲁棒性;操作控制的快速性和精准性的统一。
(1)“类脑”智能机器人可以提高认知的鲁棒性。其主要原因在于,灵长类动物的视觉认知系统对于从视网膜输入的视觉信息进行了不同的认知处理,其中腹侧通路主要是对物体内容的识别,而背侧通路则是对于物体位置相关信息的识别。两条通路既相互独立,对于认知内容有着不同的作用;又相互影响,可以进行多方位信息融合,这样的处理方式对于认知的准确性和鲁棒性都有着不可替代的作用。同时,由于高级功能脑区(如前额叶、海马区等)的调控,视觉认知可以受到过去经历和经验的影响,同时还可以进行不同程度的提炼与融合,这对认知和识别的鲁棒性都有很大的贡献。
(2)“类脑”智能机器人可以实现操作控制的快速性和精准性的统一。其主要原因在于,从硬件系统来看,人的运动系统由骨骼、关节和肌肉组成,相关的肌肉收缩或舒张由中枢神经系统与外周神经系统协同控制。而运动过程中有的肌肉起主导作用,有的则进行辅助控制和协同,保证运动可以平稳、协调、准确地进行;从软件系统来看,中枢神经系统与外周神经系统的协同控制,使得这样的多冗余、耦合、复杂非线性运动系统可以顺利完成任务。其中,中枢神经系统的输出与多层级反馈回路、外周神经系统的控制模板与触-力觉反馈以及两个系统之间的协同作用保证了控制的稳定性、快速性和准确性。
4 团队“类脑”智能机器人研究初步进展前文已对国外“类脑”智能机器人的进展情况做了介绍,国内目前也开始了相关研究,出于对本团队的工作比较熟悉,下面以中科院自动化所机器人团队为例,介绍“类脑”智能机器人研究的初步进展。团队“类脑”智能机器人的发展可以大致划分为以下3个阶段:(1)生物概念引入阶段;(2)生物功能启发阶段;(3)生物机理探索阶段。下面分别对这3个阶段进行简单介绍。
第一阶段,生物概念引入阶段。通过引入生物学中的一些特定概念与思路,结合信息科学的手段,建立初步“类脑”智能机器人框架,使机器人从功能的角度模仿人类,并产生初步应用。团队长期从事的机器人“手-眼-脑”的研究工作就是按照这个思路进行的,以机器人的“手”为例,观察到人在进行装轴孔配的过程中,物理空间中的轴受到孔的约束,在其三维构型空间形成了“碗”状区域,如图 4所示,利用该约束,通过设计状态无关输入,可以消除轴孔装配过程中的误差。受此启发,提出了基于“环境吸引域”概念,并将其泛化至高维空间[8],同时将应用扩展到机器人抓取[9]、定位[10]等操作中。
 |
| 图 4 利用“环境吸引域”概念实现机器人无传感器装配、抓取、定位等操作 |
在随后的工作中,进一步观察到,人在开锁的过程中,只需要快速地看一眼,定位出钥匙孔的大概位置,就可以利用手的柔性将钥匙插入钥匙孔内。受此启发,提出了基于粗糙传感信息和部分环境约束的“环境约束域”概念。基于以上概念,机器人可以像人一样,在无传感或粗糙传感信息的情况下,实现超越本体精度的高精度装配操作。
在这一阶段,建立了可以用于汽车和家用洁具磨削的实验平台。如图 5所示,图 5(a)展示了汽车空调压缩机零部件装配系统的装配过程,图 5(b)展示了操作员用语音和手势控制家用洁具磨削系统对家用洁具进行磨削的过程。以上系统实现了柔性、可靠的机器人高精度操作。
 |
| 图 5 汽车空调压缩机零部件装配系统(a)与家用洁具磨削系统(b) |
另一方面,建立了用于服务业的智能安保机器人与自闭症康复机器人。如图 6所示,图 6(a)展示了智能安保机器人接待来访者登记的过程,图 6(b)展示了自闭症康复机器人与自闭症儿童交互的过程。以上机器人实现了基于任务的自主认知和稳定识别。
 |
| 图 6 智能安保机器人(a)与自闭症康复机器人(b) |
第二阶段,生物功能启发阶段。在生物概念引入的基础上,通过与生物学家交流,基于神经系统机制(包括联想与记忆、注意力调控、泛化学习、快速运动反应等)的启发,逐步“白化”人类内部的“黑箱”模型,进一步改善“类脑”智能机器人的整体框架,建立具体模型。团队从2009年开始神经启发式模型的相关研究,通过与认知神经与人工智能的权威专家,美国麻省理工学院教授TomasoPoggio的反复沟通交流,结合团队在机器人视觉和运动方面的长期工作积累,建立了一系列神经启发式模型,相关工作与现有成果相比性能良好。将人类的联想记忆机制、注意力调控机制、泛化学习与记忆机制引入到模型当中,使得机器人具备了针对复杂环境下物体的鲁棒识别能力,并具有很好的泛化能力,相关论文已发表在IEEE会刊上。
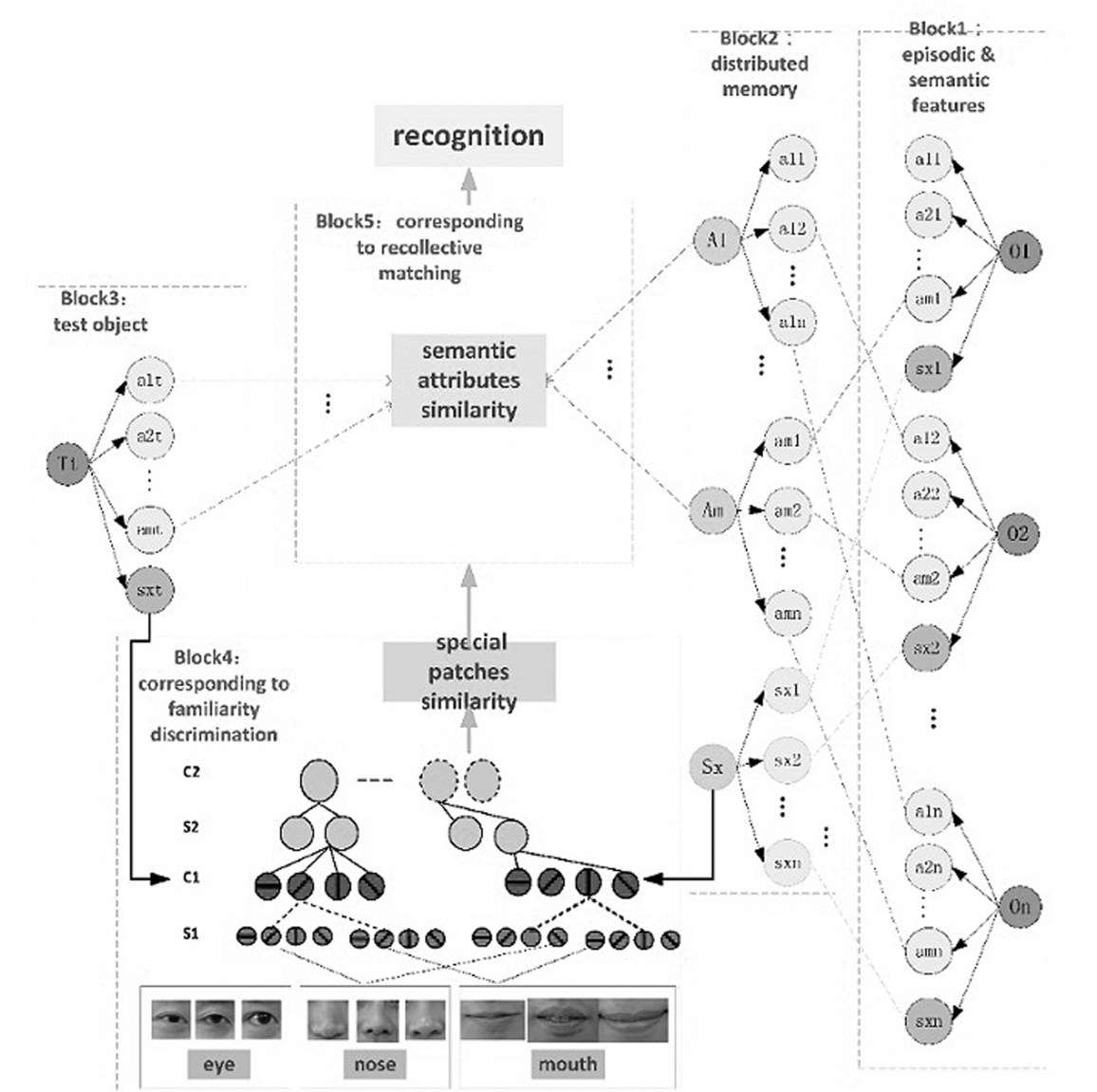
(1)首先将联想和记忆机制引入计算模型HMAX中(图 7),实现了:将物体的特征分为语义特征和情景特征分别处理;相似的特征集中存储,便于联想识别;通过相似性判别和回忆匹配的两级认知机制实现最终的识别。改进的模型可以减少识别时的存储量,加快识别速度,从而提高机器人的反应速度[11]。
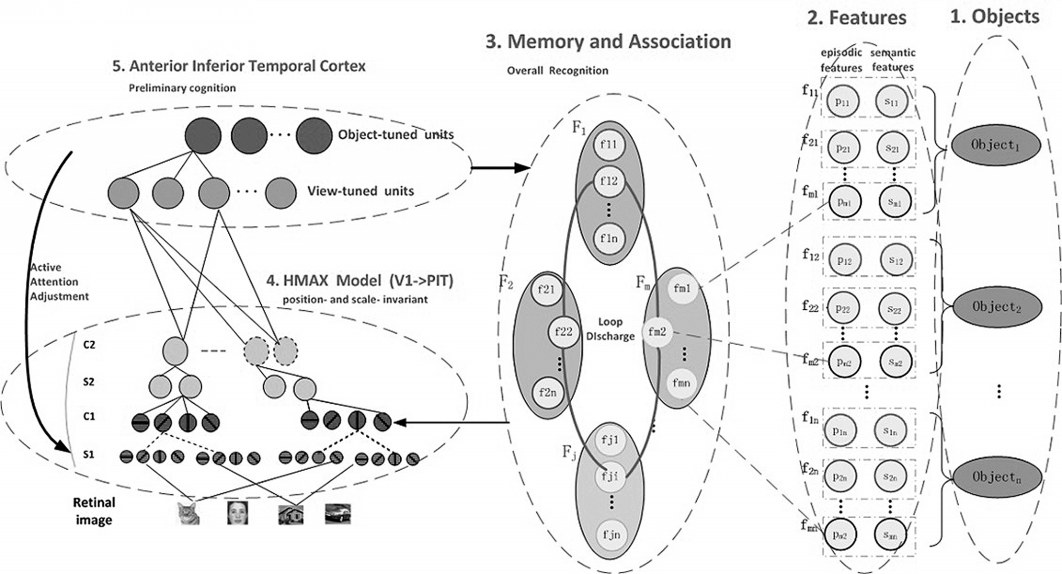
(2)基于以上工作,依据灵长类动物视皮层中前内颞叶皮层对部件、视角的调节功能以及后内颞叶皮层的多视觉任务处理能力,继续改进HMAX模型(图 8),实现了:主动调节目标姿态和滤除遮挡部件的干扰;以环路放电的形式,将各部件的语义和情景特征结合实现识别。通过这种改进,保证了旋转、遮挡情况下鲁棒的识别,扩大机器人认知的适用场景范围,为机器人个性化服务奠定基础[12]。
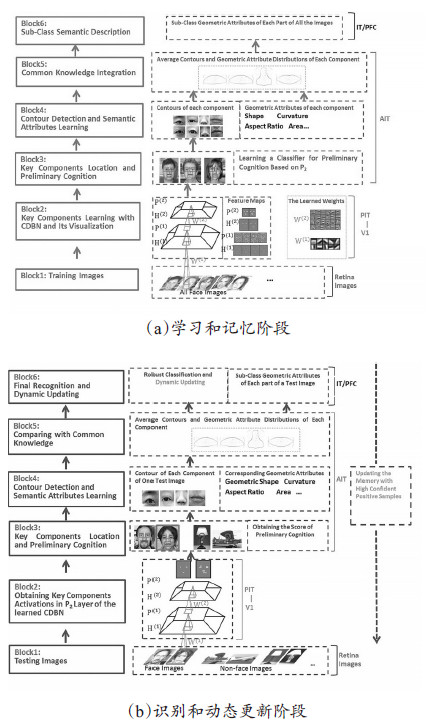
(3)进一步,模拟了婴儿对物体的自发、动态认知过程(图 9),将无监督的特征学习方式与深度置信网络(ConvolutionalDeepBeliefNetworks,CDBN)相结合,实现在没有任何先验知识的前提下,可以通过深度置信网络自发学习关键部件,并对同类物体特征进行整合形成普遍知识,进而实现知识的动态更新,提高机器人自学习和归纳泛化能力[13]。
在运动方面,我们将人类的“大脑-小脑-脊髓-肌肉”的中枢与外周运动神经系统模型引入到机器人的运动规划与控制当中来,针对仿人的“多输入-多输出”机器人运动执行机构,建立了运动信号的类神经编解码模型,使得机器人可以在运动反应速度不降低的情况下,提高机器人的运动精度,并具备运动的学习能力。
在这一阶段,我们建立了生物启发式仿人视觉演示平台与生物启发式仿人运动演示平台。图 10(a)展示了生物启发式仿人视觉演示平台,该平台基于人的记忆、联想、主动调控与初步认知等机制,实现了基于语义的鲁棒识别过程;图 10(b)展示了生物启发式仿人运动演示平台,该平台基于人的中枢神经与外周神经机理,实现了在运动中逐步提升精度,而速度不下降的学习过程。
 |
| 图 10 生物启发式仿人视觉(a)和仿人运动演示平台(b) |
第三阶段,生物机理探索阶段。进一步,利用上述框架与模型,与神经科学学家合作,共同探索大脑神经的具体机理,进一步“白化”人类内部“黑箱”模型。在中科院脑科学与智能技术卓越创新中心的领导下,团队与上海神经所的神经科学家们正在开展密切的合作,通过多种途径推进神经科学与信息科学的融合深度。通过已有的模型和神经科学中一些可能的机理相结合,正在将关于运动、学习等多方面的神经机理应用到机器人中来,一方面验证相关机理的有效性,另一方面也可提高机器人系统的鲁棒性和识别能力。另外,正在合作开发一些“类脑”机器人平台,为脑科学的研究服务。
在这一阶段,设计了面向利用生物鼠的脑认知及行为神经科学研究的智能机器鼠(图 11),辅助精神疾病的发病机理与康复治疗研究,同时也为脑科学和信息技术的交叉、神经机理启发式机器人提供一定的基础。
 |
| 图 11 生物启发鼠组成示意图 |
另一方面,与中科院昆明动物所展开合作,参与了国家重大科技基础设施建设项目“灵长类表型与遗传研究设施”的方案设计(图 12),目前该项目已经进入立项阶段。
 |
| 图 12 灵长类表型与遗传研究设施总体方案 |
除此之外,团队长期以工业为主,秉承“为功能服务,为国民经济服务”的理念,建立了一系列工业、服务业机器人平台。同时,与汽车、数控机床等重要企业合作,并且在广东等地建立了工业机器人产业化基地。
| [1] | Human Brain Project.[2015-10-25]. https://www.humanbrainproject.eu/ |
| Click to display the text | |
| [2] | The WHITE HOUSE BRAIN Initiative.[2015-10-25]. https://www.whitehouse.gov/BRAIN |
| Click to display the text | |
| [3] | Brain Mapping by Integrated Neurotechnologies for Disease Studies.[2015-10-25]. http://brainminds.jp/en |
| Click to display the text | |
| [4] | NEST Simulator | The Neural Simulation Tool.[2015-10-25]. http://www.nest-simulator.org/ |
| Click to display the text | |
| [5] | A Simulated Mouse Brain in a Virtual Mouse Body.[2015-10-25]. https://www.humanbrainproject.eu/-/a-simulated-mouse-brain-in-a-virtual-mouse-bo-2 |
| Click to display the text | |
| [6] | ECCEROBOT.[2015-10-25]. http://eccerobot.org/index.html |
| Click to display the text | |
| [7] | Google DeepMind.[2015-10-25]. http://www.deepmind.com/ |
| Click to display the text | |
| [8] | Qiao H, Wang M, Su J H, et al. The concept of“Attractive Region in Environment”and its application in highprecision tasks with low-precision systems. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2311-2327. |
| Click to display the text | |
| [9] | Liu C K, Qiao H, Su J H, et al. Vision-based 3-D grasping of 3-D objects with a simple 2-D gripper. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2014,44(5):605-620. |
| Click to display the text | |
| [10] | Liu C K, Qiao H, Zhang B. Stable sensorless localization of 3-D objects. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2011,41(6):923-941. |
| Click to display the text | |
| [11] | Qiao H, Li Y L, Tang T, et al. Introducing memory and association mechanism into a biologically inspired visual model. IEEE Transactions on Cybernetics,2014,44(9): 1485-1496. |
| Click to display the text | |
| [12] | Qiao H, Xi X Y, Li Y L, et al. Biologically inspired visual model with preliminary cognition and active attention adjustment. IEEE Transactions on Cybernetics. 2014, accepted to appear. |
| Click to display the text | |
| [13] | Qiao H, Li Y L, Li F F, et al. Biologically inspired model for visual cognition achieving unsupervised episodic and semantic feature learning. IEEE Transactions on Cybernetics, 2015, accepted to appear. |
| Click to display the text |